Содержание
Регулятор оборотов – это устройство, изменяющее скорость вращения вала двигателя. Чаще подразумеваются электрические устройства.
Зачем нужно регулировать скорость
Помимо очевидных причин, когда устройство оборудования требует наличия нескольких скоростей, называют ряд иных причин. К примеру, асинхронные двигатели на старте потребляют большой ток и не способны развить полный крутящий момент. Следовательно, подъёмники лифта начинают вращаться медленно. Между тем, асинхронные электродвигатели трёх фаз с короткозамкнутым ротором считаются сегодня максимально распространённым видом оборудования. В большинстве применяются следующие способы регулирования:
- Изменение скольжения за счёт внедрения реостатов. Обычно включаются в цепь фазного ротора через токосъёмники в виде колец. Начальные условия сильно зависят от нагрузки на вал.
- Изменение частоты вращающегося поля сегодня применяется чаще, но остаётся диковинкой. Преобразователи изменяют частоту плавно или ступенями. Порой производится коммутация для изменения числа полюсов обмотки. В последнем случае скорость повышается ступенями. Применяют значения: 750, 1500, 3000, 500, 600 и 1000 оборотов в минуту, соответственно, и количество полюсов – 2, 4, 6 и т.д.
- Изменение амплитуды питающего напряжения. Применяется для всех типов электрических двигателей. А для коллекторных часто производится изменение передаваемой мощности путём модуляции ШИМ (в стиральных машинах, к примеру, изменяется угол отсечки напряжения).

Цифровой регулятор
Если брать конкретные примеры, коммутация обмоток считается более простым средством, нежели построение преобразователя частоты. По указанной причине способ применяется чаще. Режимы работы условно разбиты на четыре группы:
- Двигатель при любой скорости отдаёт одинаковую мощность. Режим характерен для большинства станков по обработке металла, древесины.
- Мощность возрастает пропорционально скорости. Часто встречается в кондиционерах.
- Мощность на валу опережает рост скорости: центробежные насосы, вентиляторы.
- Мощность на высоких скоростях понижается.
На практике чаще встречаются первые две группы: P = const, M = const. Применение многоскоростных двигателей улучшает, как правило, технологический процесс:
- Станки деревообрабатывающей промышленности, где скорость холостого хода сильно отличается от рабочей.
- Плавный пуск лифтов требует подстройки скорости. Постепенно платформа набирает обороты.
- Контроль усилия вала с целью бережного отношения к оборудованию. Любая бытовая мясорубка подходит под определение. В кухонных комбайнах присутствует, помимо ручного, и автоматический регулятор оборотов. Тиристорная схема ориентируется на уровень искрения и гибко подстраивает режимы.
- Установки, на скорость работы которых влияет время суток. К примеру, климатические системы.
- Оборудование нефтяных скважин, где единственный двигатель используется для различных задач. Сюда относится и отрасль прокатки стали.
- Двигатели с комбинированными регуляторами оборотов.
Дополнительным преимуществом регулятора оборотов асинхронного двигателя становится возможность значительного снижения пусковых токов. Порой способны до 10 раз превышать номинальные, что становится причиной сбоя защитной автоматики. Выгодным в этом плане смотрится переключение числа полюсов, что используется в судовых двигателях. В станках часто используются механические регуляторы оборотов, аналогично скажем про автомобили (коробки передач).
В электрическом ручном инструменте изменение преимущественно плавное. Регулятор скоростей выполняется в виде потенциометра, изменяющего параметры питания транзисторного или тиристорного ключа, варьируя напряжение питания. Реверс коллекторных двигателей производится перекоммутацией обмоток, для электрического инструмента это редко актуально, не считая шуруповёртов. Кухонные комбайны демонстрируют, как правило, ряд скоростей и реверс. Иногда удобен один способ, иногда другой, все зависит от компромисса между ценой и простотой изделия. В промышленности, помимо указанных, фигурируют прочие факторы.
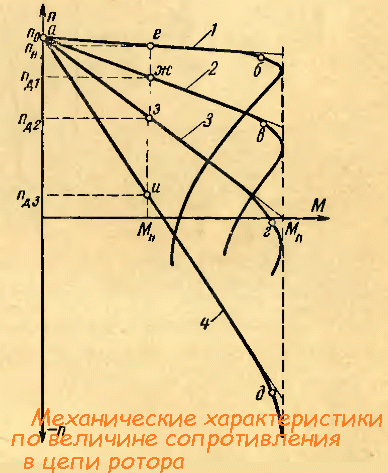
Механическая характеристика двигателя
Вращающий момент двигателя считается важнейшей характеристикой. Обычно величина падает с повышением оборотов, если потребляется прежняя мощность. Формулу зависимости вращающего момента от мощности нелегко найти в учебниках и современном интернете, указана на скрине. У каждого двигателя отмечаются номинальные параметры и предельные. Это касается и вращающего момента.

Формула зависимости вращающего момента
Скорость вращения зависит от упомянутого параметра, вдобавок они обратно пропорциональны. Потому шофёр перед въездом на подъем снижает передачу. Для асинхронного электрического двигателя связь представлена на графике. Форма кривых демонстрирует, что скорость вращения вала на генерацию всегда больше двигательной. И это правильно, между вращающимся полем и ротором всегда останется разница. Следовательно, для генерации частоты напряжения 50 Гц ось должна делать больше оборотов (свыше 3000 в минуту).

График скорости вращения вала
Из механической характеристики проистекает, что при торможении возникает большой отрицательный момент, что эквивалентно отдаче мощности назад в сеть. Налицо известная многим реактивная составляющая в одном из проявлений. Рабочим участком становится а-б, где двигатель способен развить максимальный момент. Механические характеристики двигателя используются для вычисления схемы построения регулятора оборотов. К примеру, для двигателей с короткозамкнутым ротором, нагруженным на реостат, это линии 2-4. Все регуляторы оборотов оцениваются по механической характеристике.
Вариатор скорости
Бесступенчатые коробки передач сегодня прочно обосновались в автомобильной промышленности. Их особенностью считается плавная подстройка скорости под нужды водителя. Выполняется ременной передачей через систему конусов. От их количества и параметров зависит успешность функционирования устройства.
В промышленности вариаторы бывают электрическими, механическими или гидравлическими. О ручном управлении нет речи в силу больших мощностей. К примеру, лошадиная сила не дотягивает даже до киловатта. Понтиак на 700 коней не крут, если сравнить с турбиной ГЭС, развивающей мегаватты. Конечно, электростанция не содержит вариатора в виде регулятора скорости вращения вала. Пример приведён для создания представления о мощностях, фигурирующих на производстве.
Бесступенчатые регуляторы скорости – непременный спутник станков для точной и качественной обработки деталей. Так было до появления электронных контроллеров. Большинство промышленных вариаторов оперируют с коэффициентами умножения до 5 включительно. Расширенный спектр скоростей скачком усложняет конструкцию, что сильно снижает выгоды от применения технологии. Снижается надёжность переключения. На практике делают следующим образом:
- Берётся двигатель с коммутируемыми полюсами на две скорости с отношением 1 к 4.
- Момент передаётся на исполнительную часть станка через вариатор с идентичным диапазоном.
- В результате получается установка, где перекрываются все значения. Подобное используется и в автомобильных вариаторах.
Допустимо в описанную кинематическую цепь добавлять иные редукторы, ременные или клиновидные, производя дальнейшее расширение диапазона.
Муфты скольжения
Муфты скольжения асинхронных двигателей ограничены соотношением 1 к 4 и позволяют плавно изменять скорость. КПД такого устройства занижено на величину скольжения (в литературе обозначается через S). Под скольжением понимается разница между скоростями вращения ротора и привода оборудования. При разнице в 80% (максимум) КПД составит лишь 20%. Потеря мощности происходит целиком на барабане муфты.
Указанный способ находит ограниченное применение. Используется в комбинированном варианте: сочетание многоскоростного двигателя с муфтой сравнительно узкого диапазона. В результате КПД ощутимо возрастает. Чтобы полнее проиллюстрировать сказанное, рассмотрим пример:
- При использовании муфты скольжения с регулировочным диапазоном 1 к 5 КПД составляет 20%.
- Двигатель мощностью 5 кВт четыре из них станет рассеивать на силы трения в муфте. Ремень проскальзывает вокруг барабана, снижая скорость передачи.
Коммутация обмоток
Это простейший способ изменения скорости двигателя, но затратный по сборке. Часто применяется в напольных вентиляторах как максимально незаметный. В результате пара-тройка кнопок на стойке позволяют выполнить необходимые манипуляции. Обычно двигатели указанного типа показывают две, три или четыре скорости. Как правило, это модели с короткозамкнутым ротором.
Минус описанного технического решения в том, что теряется мощность на низких скоростях, используется лишь часть обмотки. На практике тяжело найти мотор с числом обмоток более двух. Анализ показывает, что уже в этом случае расходуется наполовину больше меди, а стали – на 30-40%. Одновременно наблюдается эффект снижения КПД за счёт падения коэффициента мощности (увеличивается реактивное сопротивление). Это прослеживается на примере асинхронных двигателей 220 В с пусковой обмоткой, неизменно отключающейся, когда ротор наберёт обороты. Это делается для снижения доли реактивной мощности.
Две отдельные обмотки дают и преимущества, иначе бы их не использовали. Схема коммутации получается проще, а технические характеристики мотора максимально приближены к заданным. В двигателях с отношением скоростей 1 к 2 непременно применяется единственная обмотка. Две обмотки встречаются в трёхскоростных моделях. Особенно сложны трёхфазные двигатели, где при одинаковом числе номиналов оборотов встречается разное число выводов, что зависит от схемы включения (треугольник, звезда и пр.).
Именно на процесс сборки обращают внимание при конструировании. К примеру, для получения четырёх скоростей с минимальным количеством выводов требуется брать соотношения, как 1 к 2: 500, 750, 1000, 1500 или 500, 1000, 1500, 3000. Иначе количество контактов коммутационного реле сильно возрастает. В итоге большая часть многоскоростных двигателей демонстрирует две обмотки.
Пусковые реостаты
Часто для изменения скорости вращения вала используются сопротивления в цепи трёхфазного статора. На момент пуска регистрируется крайне большой ток, для погашения реостат задействуется на полную. По мере разгона разность между полями снижается, сопротивления становятся меньше. Этим увеличивается потокосцепление, вал выходит постепенно на номинальный режим. В конечном итоге реостат замыкается параллельно через реле и отключается. Исходными данными для расчёта величин станут:
- Тип двигателя. Читается по маркировке.
- Режим работы. К примеру, длительный. Данные берутся из паспорта.
- Номинальная мощность обычно указана на шильдике.
- Номинальное напряжение указывается отдельно для звезды и треугольника, допустим, 220 и 380 В.
- Номинальный ток. Обычно указывается линейный (между фазами).
- Скорость вращения вала.
- Иногда указываются: схема соединения обмоток ротора, номинальная ЭДС на его разомкнутых зажимах при номинальном напряжении, номинальный ток ротора (в рабочем режиме).


